Установка rosa linux
Содержание:
- Программы
- Управление пакетами
- Установка Rosa Linux R11 Plasma 5 или KDE 4 или LXQT или XFCE
- Сопутствующие статьи
- Какие задачи стоят перед отечественными разработчиками?
- Резюме
- Установка сторонних программ
- Открытый тест надежности жестких дисков и SSD
- Графическая оболочка ROSA Fresh R11 Plasma 5
- Работоспособность устройств компьютера
- Взаимодействие с Windows
- Исправления сбоев при работе
- Настройка ПО из образа
- Подготовка
Программы
Выбор предустановленного программного обеспечения ROSA прагматичен. В основном вы получаете приложения KDE/Qt, такие как файловый менеджер Dolphin, музыкальный проигрыватель Clementine, текстовый редактор Kwrite и видеоредактор Kdenlive. Другие приложения включены, поскольку они предположительно считаются лучшим инструментом для работы: вы получаете веб-браузеры Firefox и Chromium, GIMP (для редактирования изображений) и полный пакет LibreOffice. Вы также получаете поддержку мультимедиа из коробки, включая плагины Flash для Firefox и Chromium. Я не слишком заинтересован в последнем, но мне было приятно, что я могу воспроизвести любой медиа-файл без необходимости искать кодеки.
Рабочий стол Plasma и большинство приложений относятся к концу 2018 года. Например, ROSA поставляется с Plasma 5.14.4 и LibreOffice 6.0.7 (оба выпущены в ноябре 2018 года). Ядро Linux имеет версию 4.15.0 (январь 2018 года), а systemd — версии 230 (март 2017 года). Я не уверен, почему ядро и система инициализации так стары, думаю, что это результат того, что ROSA ориентирована в первую очередь на корпоративных клиентов.
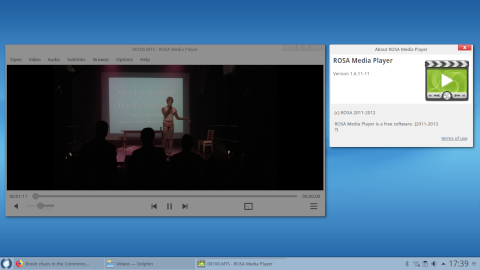
Следует отметить, что ROSA также поставляет три своих собственных приложения: ROSA Media Player — это форк MPlayer, ROSA ImageWriter — основной инструмент для записи ISO-образов на USB-устройство, ROSA Freeze — это приложение, которое описывается в репозитории как «старый файловый архиватор и распаковщик, который больше не используется «. На самом деле кажется, что два других приложения ROSA также довольно старые — у обоих не было никаких обновлений в течение нескольких лет.
Управление пакетами
Программное обеспечение может управляться через Rpmdrake или из командной строки. Rpmdrake выполняет свою работу, но не настолько удобен для пользователя, как другие программы, называемые сегодня «центром приложений» или «магазином программного обеспечения». Rpmdrake организует пакеты по категориям, и вы можете ограничить поиск типами пакетов, такими как «Пакеты с графическим интерфейсом» или «Мета-пакеты». Вы можете получить больше информации об отдельном пакете, щелкнув по его имени, и вы можете выбрать пакеты для установки, установив флажок.
Поиск пакетов может быть немного сложным. Вы часто получаете очень большое количество результатов, что затрудняет поиск того, что нужно (в частности, если вы не совсем уверены в точном названии). В других случаях поиск не дал результатов — например, при поиске «password» не было найдено ни одного менеджера паролей, даже если такие приложения, как KeePassX, доступны. Я не смог найти способ поиска строк как в имени пакета, так и в описании, и выбор «Help» из меню «Help» вернул «unknown error».
Репозитории ROSA довольно большие — любой пакет, который я хотел установить, был доступен. Хотя установка программного обеспечения работала не всегда. Например, я не смог установить VLC, потому что не удалось разрешить одну из его зависимостей и не удалось запустить браузер Tor из-за отсутствия модуля. Другое программное обеспечение будет установлено, но с неприятными сюрпризами. Когда я установил DigiKam, у меня также появилось приложение под названием Marble (я не понимаю, почему «виртуальный глобус» является зависимостью менеджера фотографий), почтовый клиент KMail имел 175 зависимостей и добавил шесть разных записей в меню приложения.
Мне было интересно управлять программами в командной строке, но там я столкнулся с другой проблемой: я понятия не имел, что использует менеджер пакетов ROSA. Дистрибутив ROSA поставляется с очень небольшим количеством документации, и, как уже отмечалось, ее веб-сайт имеет довольно ограниченный раздел на английском языке. Только после того, как у меня появилась блестящая идея проверить, какой менеджер пакетов использовал Mandriva, я узнал, что ROSA использует менеджер пакетов urpmi. Я не был знаком с urpmi, но после небольшого чтения мануалов я смог избежать Rpmdrake.
Насколько я могу судить, ROSA не поддерживает пакеты Snap и Flatpak. Я мог бы установить несколько простых пакетов AppImage, но более крупные приложения, такие как DigiKam, Geany и VLC, неизменно не запускались.
Что касается управления программным обеспечением, ROSA показывает уведомление, когда доступны обновления программного обеспечения. Обновления применяются с помощью Rpmdrake, и я не столкнулся с проблемами с обновлениями системы. Во время тестового периода я получил обновления примерно для 50 пакетов, все из которых были применены быстро и аккуратно. Приятно отметить, что Rpmdrake сообщает вам, что вы должны перезагрузить систему после обновления ядра.
ROSA использует свои собственные репозитории. Список репозиториев включает в себя репозитории «Main», «Testing», «Non-free» и «Restricted». Насколько я могу судить, ROSA использует зеркала только в России (моя система получает все свое программное обеспечение с mirror.rosalab.ru/rosa/rosa2016.1/repository/, и единственным альтернативным зеркалом, которое я смог найти, был репозиторий yandex.ru).
Установка Rosa Linux R11 Plasma 5 или KDE 4 или LXQT или XFCE
В загрузочном меню образа есть опции «Запустить установку» и «Запустить
в Live режиме». Обычно я тестирую дистрибутивы в
Live режиме, но иногда выполняю установку на
компьютер. Вот и в этот раз я решил сделать установку.
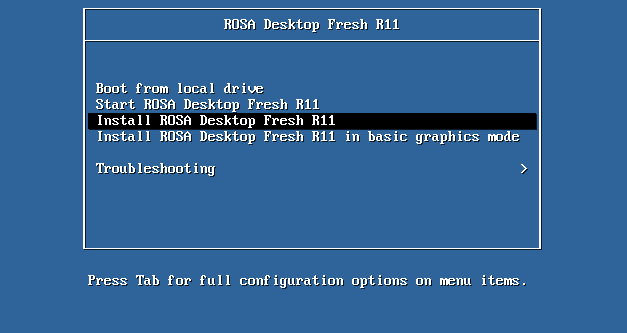
Установщик Rosa Linux работает в GUI режиме.
Сначала запускается мастер настройки параметров, затем выполняется
установка. Установщик можно запустить как непосредственно из загрузочного
меню, так и во время выполнения Live сессии.
Возможно запускать установку лучше именно из Live
сессии, по крайней мере будет чем заняться пока Rosa устанавливается.
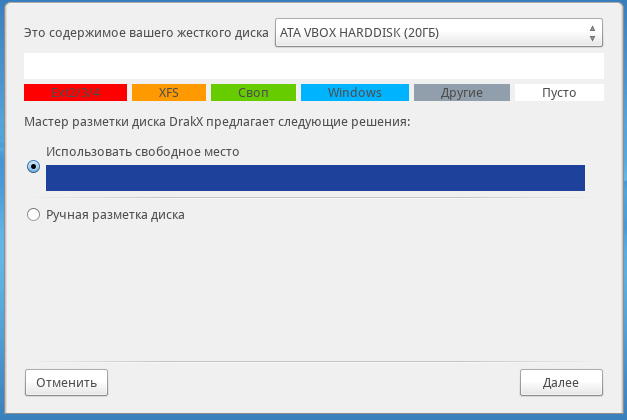
Есть возможность сделать ручную разметку диска и даже выполнить установку
Rosa Linux второй системой «рядом с Windows». Но если на диске нет
свободного места, тогда изменять разметку диска придется вручную.
Я как раз и выбрал установку рядом с Windows. Разметку диска не менял,
устанавливал в уже существующий раздел.
Инструмент разметки диска более продвинутый, чем в Альт Линукс.
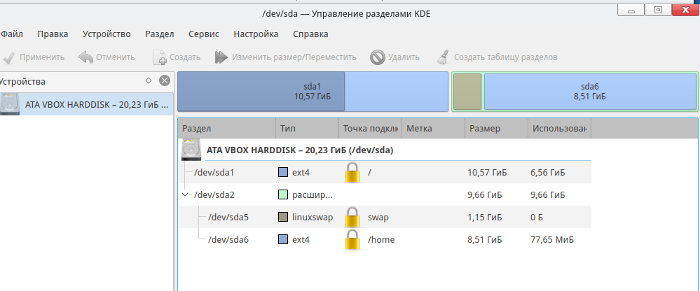
Из необычного, в настройках установки, есть опция выбора размера
swap файла, сам файл размещается на разделе
root. Но эта опоция доступна не всегда. Если диск пустой и
выбрана автоматическая разметка, тогда установщик делает разметку со
swap разделом. Вот такую разметку делает установщик, на
пустой диск:
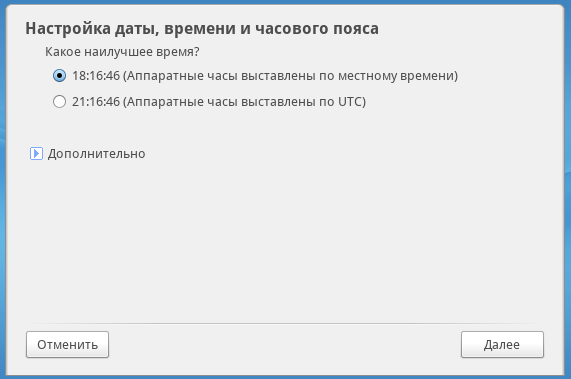
Еще есть опция «локальное время» в часах БИОС. Это полезная опция для
двойной загрузки с Windows, позволит избежать
проблемы постоянного перевода времени на 3 часа.
Установить Роса Линукс не сложно. Даже с двойной загрузкой (рядом с Windows).
Установка, на немолодой компьютер, заняла примерно 20 минут. Железо —
чипсет Intel p45, процессор
Core 2 Duo, 4 Гб оперативной памяти, довольно быстрый
HDD.
После установки, «из коробки», есть русская локализация
интерфейса, сервер
Samba (можно расшарить файлы по локальной сети), есть поддержка мультимедийных кодеков.
Так что сразу можно пользоваться системой.
Скриншоты установки.
Если будет использована двойная загрузка, вместе с
Windows, тогда нужно включить опцию «Аппаратные часы
выставлены по местному времени»:
В этом примере диск пустой и выбрана автоматическая
разметка. Но если на диске есть разделы, можно в ручном режиме выбрать
раздел для установки Роса:
Установка идет:
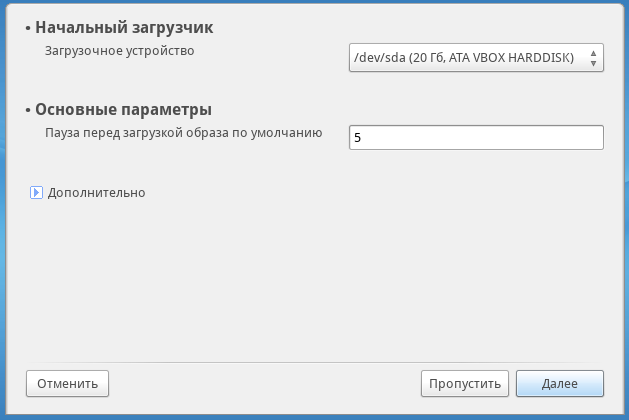
Установка закончена, определение параметров загрузчика:
Экран авторизации, установленной Росы (сборка Plasma
5):
Кстати этот экран авторизации выглядит просто уродски на
FullHD экране. Растянуто по всей ширине как сопля. Но тему этого
экрана можно сменить в настройках системы.
Сопутствующие статьи
-
Обзор Rosa Linux
R11, сборка KDE 4 — в этой статье подробный разбор этого
дистрибутива. -
Обзор Rosa
Linux R11, сборка Plasma 5 — в этой статье подробный разбор
этого дистрибутива.
P.S.
Если вы живете в г. Краснодар и страстно желаете установить Роса
Linux
или просто «пощупать» ее — звоните или пишите: Подробнее…
Поделитесь этим сайтом с друзьями!
Если вам оказалась полезна или просто понравилась эта статья, тогда не стесняйтесь — поддержите материально автора. Это легко сделать закинув денежек на Яндекс Кошелек № 410011416229354. Или на телефон +7 918-16-26-331.
Даже небольшая сумма может помочь написанию новых статей 🙂
Или поделитесь ссылкой на эту статью со своими друзьями.
Какие задачи стоят перед отечественными разработчиками?
В принципе, ни о чем новом в этом случае говорить не приходится. Если сейчас разрабатывается действительно новая российская операционная система для ПК, то перед ее создателями стоит огромное количество задач. Перечислим всего лишь основные из них:
- Выпуск ОС, которая будет выполнять все свои задачи, работать на серверах и рабочих станциях российского же производства.
- Создание рабочих и функциональных средств виртуализации под нее.
- Та самая разработка средства управления базами данных, отладка которого сейчас возложена на РЖД.
- Создание, развитие и поддержка отечественной среды разработки приложений.
- Выпуск средств, которые могли бы быть использованы для автоматизирования тестирования.
- Создание отечественного «магазина приложений». Даешь достойный ответ всяческим AppStore!
- Выпуск ОС, которая может работать не только на настольных компьютерах и ноутбуках, но и на мобильной технике (смартфонах, планшетах). Эта российская мобильная операционная система должна стать конкурентом «Андроида», iOS, Windows Mobile.
- Разработка средств проектирования, которые облегчат написание новых приложений.
- Анализ бизнес-сектора экономики, создание специализированного кластера программ специально для него.
- Наконец, разработка российской операционной системы должна предусматривать создание собственного рабочего окружения (DE).
- Создание новых средств для установки, развертывания и отладки написанных программ.
- Наличие возможности для безболезненной миграции бизнеса и домашних пользователей со старых версий ОС.
- Формирование учебных курсов, которые расскажут пользователям о том, что такое российская операционная система для ПК, о ее возможностях и перспективах.
Резюме
Так же как и предыдущие версии Росы, эту я тоже могу рекомендовать к
использованию. Единственное замечание это устаревшая версия
KDE. Уже давно используется пятое поколение этой
графической оболочки. Само по себе KDE 4 не
проблема, но возможно возникнут сложности с установкой сторонних программ.
Если сравнивать Роса Линукс Р11 с другими дистрибутивами. Из российских
дистрибутивов это безусловно лучший. Во всяком случае наименее проблемный.
Но если брать шире, то уже не так однозначно. Есть
Ubuntu, есть OpenSUSE, Fedora,
CentOS.
Мне всегда, с первого теста, нравился этот дистрибутив. Но тем не менее,
лично для себя у меня пока не возникло сильное желание заменить
Ubuntu на Росу. Не потому что Роса плоха, просто
Убунта чуть лучше.
Установка сторонних программ
Недавно я добавил еще один тест для дистрибутивов Линукс. Возможность
установки прикладных программ не из репозитария дистрибутива. Такая
возможность сегодня актуальна. Например браузер Google
Chrome или программа Skype
редко в каких репозитариях есть, но их можно скачать с официальных сайтов.
Итак. В Rosa Linux используются установочные
программные пакеты rpm типа. Что у меня
получилось.
Браузер Opera. Пакет в rpm
формате, скачанный с сайта Opera.com установился и
браузер работает.
Браузер Google Chrome. Пакет в
rpm формате, скачанный с сайта
Google.com установился и браузер работает. Но потребовалась установка
нескольких связанных пакетов из репозитария Росы, эти пакеты были
установлены автоматически.
Skype. Пакет в rpm
формате, скачанный с сайта Skype.com не устанавливается. Но в репозитарии Росы
есть пакет get-skype. Он устанавливается «из
коробки» и доступен через меню приложений — ярлык «Skype Install».
Запуск этого пакета устанавливает Skype и Скайп работает.
TeamViewer. У меня не получилось установить эту программу. Текущие
версии программы требуют КДЕ 5, а единственная старая, которую я нашел на их
сайте (версия 9), не работает на Росе 11.
В целом неплохо. Тест пройден. TeamViewer далеко не всем нужен и есть
альтернативы этой программе. В крайнем случае можно установить библиотеки
KDE 5.
Однако нужно иметь в виду, что проблема устаревшей версии КДЕ может
возникнуть с другими программами. Кстати, есть сборка с
KDE 5, называется Rosa Fresh Plasma 5. Обзор этой
сборки я сделаю позже.
Открытый тест надежности жестких дисков и SSD
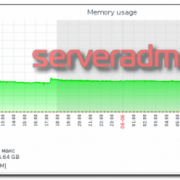
Целью проекта является выявление дисков с максимальным временем работы без ошибок. В качестве меры надежности выбрано время работы диска в годах деленое на количество ошибок плюс один: Power_On_Hours/(1 + Number_Of_Errors), т.е. среднее количество лет работы до возникновения первой ошибки (или время между ошибками).
Таблицей с результатами надо пользоваться аккуратно
Надо обращать внимание не только на рейтинг, но и на число проверенных экземпляров модели диска. Если рейтинг низкий, то смотрите на число дней работы этого диска и количество накопленных ошибок
Если диск новой модели, то он будет постепенно подниматься к вершине рейтинга, если отработает достаточное время без ошибок.
В этом проекте есть целое поле задач для исследований. Наиболее актуальными являются улучшение формулы для меры надежности, формулы для усреднения результатов для нескольких дисков одной модели и выявление типов ошибок, указывающих на реальные неисправности или их скорое возникновение.
Пробу компьютера можно, как и раньше, сделать из приложения в SimpleWelcome или из консоли одной простой командой:
Графическая оболочка ROSA Fresh R11 Plasma 5
В оформлении очень мало изменений относительно типового оформления
KDE 5.
Меню Rosa SimpleWelcome больше нет, используется обычное меню
KDE. Для увеличения размера, нужно кликнуть на
картинке.

KDE 5, на мой взгляд, выглядит симпатичнее и более современна чем KDE 4.
В целом KDE самая навороченная GUI оболочка из тех, которые сегодня используются. Включая
GUI Windows и MacOS.
В KDE можно очень многое сделать с интерфейсом. Например можно трей
перенести в левую часть панели задач. Как это на скриншоте выше. Однако у
такой сверх гибкости в настройках есть и оборотная сторона —
в KDE легче «сломать»
что-нибудь.

«Из коробки» главное меню открывается клавишей Windows
(на клавиатуре). Это плюс, для тех кто привык этим пользоваться в
Windows.
Но сворачивание всех окон привязано к другим клавишам (не как на
Windows) — Windows +
Shift + D. Переопределить это сочетание клавиш
можно в «Настройка глобальных комбинаций клавиш — KWin» и там в конце списка
найти нужную команду.
Также же можно настроить чтобы файловый менеджер Долфин открывался по
клавишам Windows + Е. Для этого в «Настройка
глобальных комбинаций клавиш» нужно добавить новую команду.
Вообще, одна из «фишек» KDE в том, что там можно кучу команд и действий
связать с клавиатурой.
Некоторые проблемы интерфейса KDE в том варианте, который представлен в
ROSA Plasma 5:
- Подменю, в главном меню, очень короткие. Ограничение по 4-5 пунктов и
если программ в этом подменю больше, тогда приходится открывать еще одно
подменю. Исправить это можно ручным редактированием главного меню. - В файловом менеджере Долфин не видно примонтирован диск или нет. В
отличии, например от GNOME, для
примонтированных дисков (разделов) нет специального значка.
Работоспособность устройств компьютера
Мы продолжаем постоянно улучшать базу данных оборудования, чтобы сделать ее еще более полезной. Сегодня хотелось бы представить долгожданную новую функциональность — автоматическое определение работоспособности устройств компьютера. Этого удалось добиться с помощью анализа логов, собираемых с компьютеров пользователей.
Автоматически определяется работоспособность следующих устройств:
- Графические карты
- Wi-Fi-карты
- Ethernet-карты
- Bluetooth-карты
- Модемы
- Жесткие диски (наличие критических ошибок)
- Мониторы
- Батареи (низкая емкость)
- Контроллеры смарт-карт (требуется hw-probe из ветки master)
Для следующих классов устройств также определяется статус неработоспособности, если драйвер не найден, но пока не ясно, как проверить их работоспособность:
- Звуковые карты
- Кардридеры
- Считыватели отпечатков пальцев
- TV-карты
- DVB-карты
Вы можете проверить свои предыдущие пробы — статусы устройств в них уже обновлены!
Или сделать новые пробы (обновление hw-probe не требуется, анализ произведет сервер):
hw-probe -all -upload
Ближайшим аналогом проекта является проект Checkbox (System testing) в Ubuntu, но там в каждом тесте требуется участие человека.
Всем спасибо за внимание!
Взаимодействие с Windows
Не монтируется диск NTFS с Windows последних версий
Для корректной работы Windows и ROSA Linux на одном компьютере рекомендуется отключить в Windows «быстрый старт» — эта технология, по сути, аналогична «спящему режиму» Росы и наша система старается не трогать разделы, где «спит» windows чтоб ее не сломать.
- Для отключения в консоли Windows под администратором наберите powercfg -h off
- Чтоб смонтировать NTFS диск «насильно» можно в ROSA Linux выполнить # ntfsfix /dev/<имя раздела с ntfs>(sda, sdb)
Пропала строка с запуском Windows из загрузчика grub
Корень проблемы — «быстрый старт» системы Windows или некорректное завершение работы в этой системе, совпавшее с обновлением загрузчика или ядра в ROSA Linux. Загрузчик ROSA не монтирует диск NTFS требующий проверки или тот, на котором «спит» windows. Для исправления:
- Смонтируйте NTFS диск в Dolphin
- Выполните в консоли # update-grub2
Исправления сбоев при работе
После установки проприетарных драйверов или обновления ядра система не грузится
- Попробуйте загрузиться с другим ядром, выбрав его в начальном меню загрузки
- Если загрузчик grub системы, где вы устанавливали драйвера, не основной (ваша система — не первая строчка) то загрузитесь в основную систему и обновите там grub командой update-grub2 (для Росы)
- Дождитесь окончания текстовой загрузки (около 4 минут), переключитесь в текстовую консоль ctrl+alt+F2, войдите под root и, запустив XFdrake, переключите видеоподсистему на свободный драйвер и потом попробуйте еще раз
Черный экран при входе в систему, после ввода пароля в KDE 4
По какой-то причине (некорректное завершение работы?) повредились настройки вашего рабочего стола.
вызовите krunner alt+F2 и выполните команду
kde4-reset
Ваш рабочий стол будет сброшен к виду «по-умолчанию»
Возможно, повреждена база RPM. Для ее восстановления выполните с правами администратора команду
rpm-restore
Вы включили режим заморозки ROSA Freeze. Выключите его.
Настройка ПО из образа
Не работает база данных библиографии в LibreOffice Writer
Для работы пункта «Сервис/база данных библиографии» вам необходимо установить LibreOffice Base (пакет libreoffice-base) и OpenJDK. Для экономии места мы не включили эти пакеты в установочный образ ROSA Fresh.
Подготовка
Если вы устанавливаете систему на компьютер, на котором есть важные данные, то обязательно создайте резервную копию этих данных на внешнем носителе.
Скачайте ISO-образ системы и создайте загрузочный носитель. Инструкция: Как создать загрузочную флешку
Обратите внимание на то, что ROSA Fresh R11 представлен для 32-х и 64-х разрядных систем. Если вы устанавливаете ROSA Fresh рядом с Windows, то вы можете заранее создать отдельный раздел диска для этого
Читайте по установке Linux Mint
Если вы устанавливаете ROSA Fresh рядом с Windows, то вы можете заранее создать отдельный раздел диска для этого. Читайте по установке Linux Mint.